Satellite positioning
Accuracy
This is the accuracy reached with PPP and NRTK showed with static methods and NRTK accuracy with a relative method.
How does it works?
The GGA contains every informations we need.
This is the accuracy reached with PPP and NRTK showed with static methods and NRTK accuracy with a relative method.
The GGA contains every informations we need.
Only CAM and DENM are useful in our project.

Messages are sent every 500 ms. This architecture was inspired from Orange 5GCroCo project.
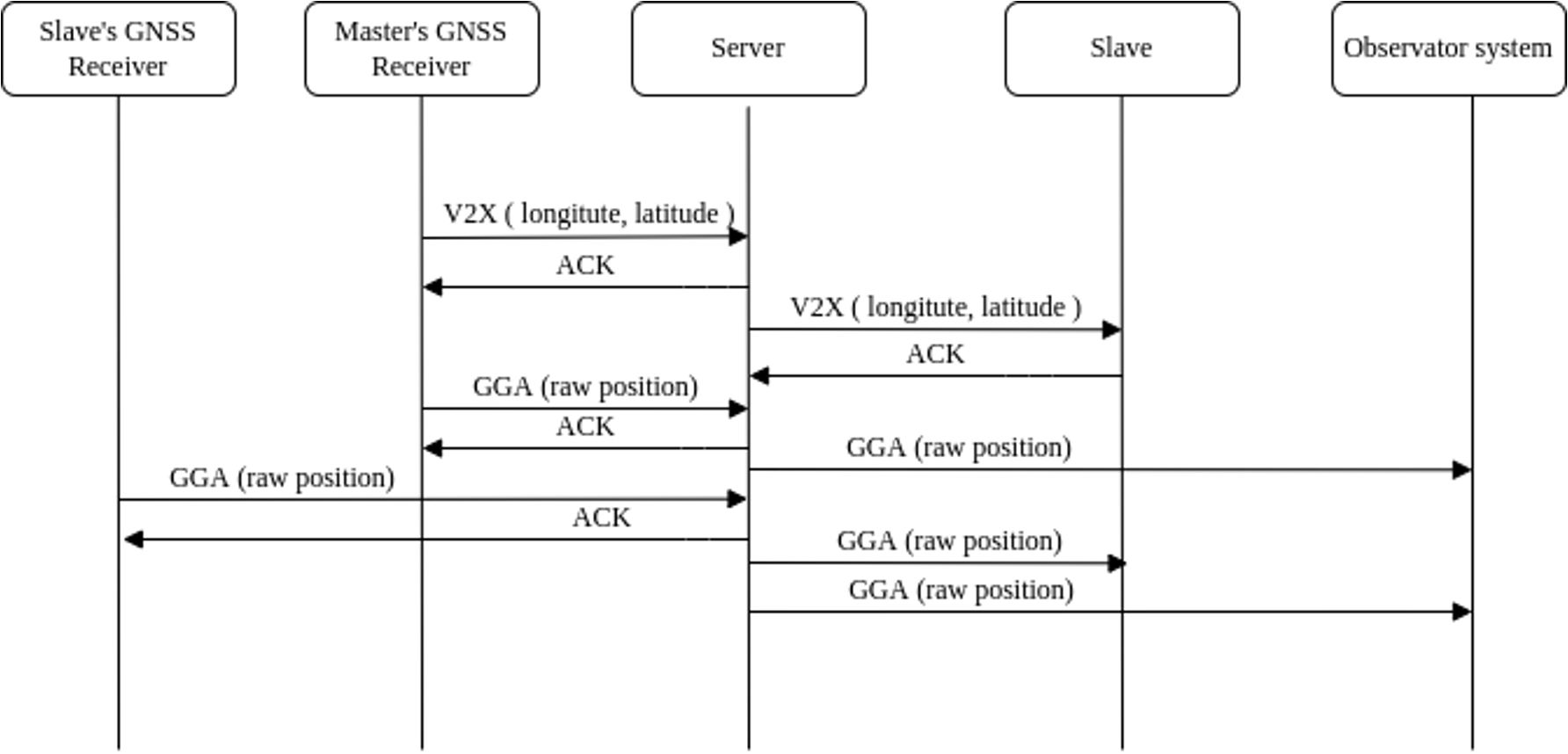
This figure shows how messages are exchanged from and to the different entities.

The shuttle is controlled with ROS and has a built-in GPS antenna.
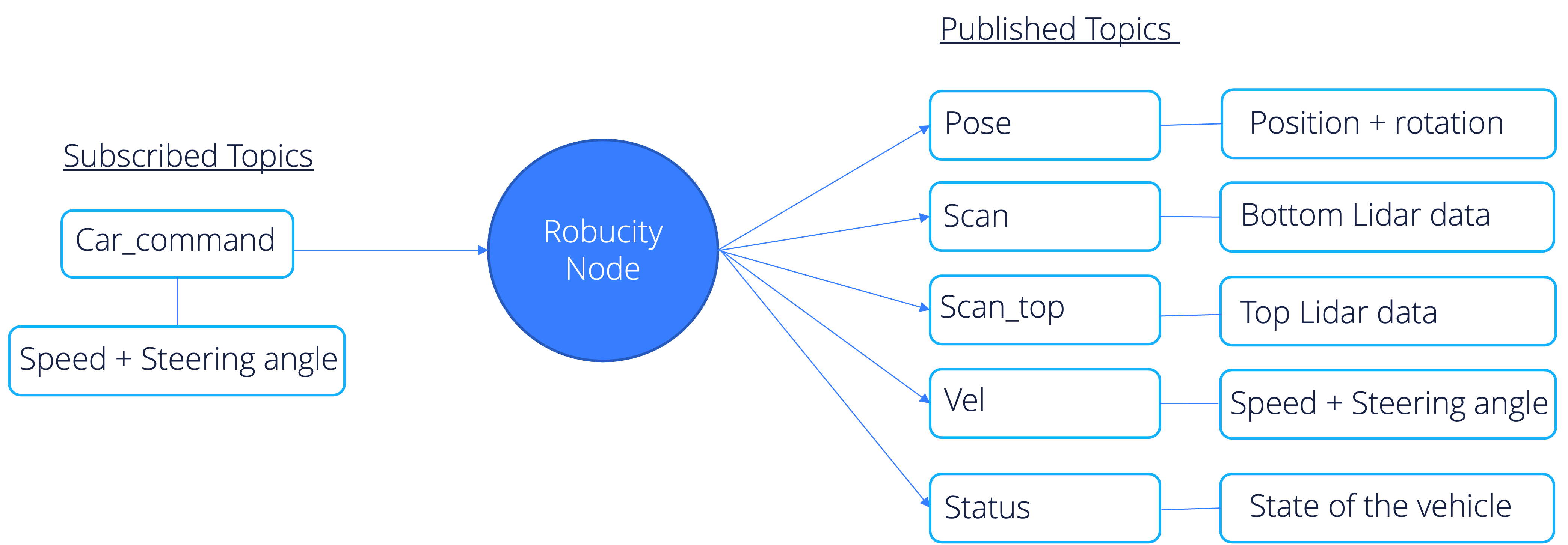
These are the ROS topics we have access to control or monitor the shuttle.